Portable Lightweight Knee Exoskeleton

 Datasheet
Datasheet
Specifications
| Property | Value |
|---|---|
| Unilateral Mass | 2.8 kg |
| Bilateral Mass | 4.5 kg |
| Size | 570 * 200 * 180 mm |
| Motor Voltage | 48 V |
| Motor Continuous Torque | 13 Nm |
| Motor Speed | 155 RPM |
| Peak Output Torque | 40 Nm |
| Output Speed | 26.2 rad/s |
| Gear Ratio | 6:1 |
| Range of Motion | 0 - 160 degrees |
| Battery Life | 2 hours |
| Wearable Structures | Small. Middle, Large |
| Actuation Type | Portable |
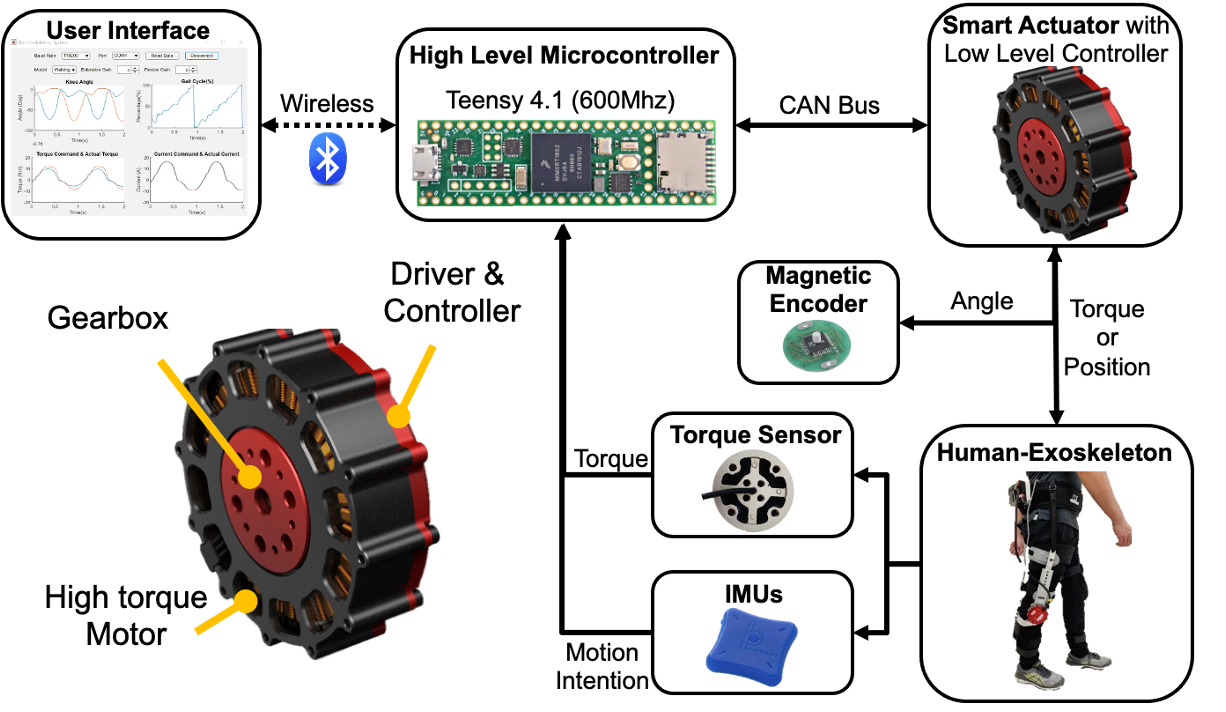
Portable Exoskeleton Architecture
Video
Comparison
Portable System

Tethered System

Publication
1. S. Yu, J. Yang, T. Huang, J. Zhu, C. Visco, F. Hameed, J. Stein, X. Zhou and H. Su,
“Artificial Neural Network-Based Activities Classification, Gait Phase Estimation, and Prediction” in Annals of Biomedical Engineering, 2023.
![]() PDF
PDF
2. S. Yu, T.H. Huang, A. Di Lallo, S. Zhang, T. Wang, Q. Fu, and H. Su "Bio-Inspired Design of a Self-Aligning, Lightweight, and Highly-Compliant Cable-Driven Knee Exoskeleton" Frontiers in Human Neuroscience. p.763. Nov. 2022.
![]() PDF
PDF
3. T. Huang*, S. Zhang*, S. Yu, M. MacLean, J. Zhu, A. Lallo, C. Jia, T. Bulea, M. Zheng and H. Su, " "Modeling and Stiffness-Based Continuous Torque Control of Lightweight Quasi-Direct-Drive Knee Exoskeletons for Versatile Walking Assistance," in IEEE Transactions on Robotics, vol. 38, no. 3, pp. 1442-1459, Jun. 2022.
![]() PDF
| Video
PDF
| Video
4. S. Luo, G. Androwis, S. Adamovich, H. Su, E. Nunez and X. Zhou. "Reinforcement Learning and Control of a Lower Extremity Exoskeleton for Squat Assistance." Frontier Robotics & AI 8:702845. 2021.
![]() PDF
PDF
5. S. Chen, D.T. Stevenson, S. Yu, M. Mioskowska, J. Yi, H. Su, M. Trkov, "Wearable Knee Assistive Devices for Kneeling Tasks in Construction," in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 4, pp. 1989-1996, Aug. 2021.
![]() PDF
PDF
6. J. Wang, X. Li, T. Huang, S. Yu, Y. Li, T. Chen, A. Carriero, M. Oh-Park, H. Su, “Comfort-Centered Design of a Lightweight and Backdrivable Knee Exoskeleton”, IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 4265-4272, Oct. 2018.
![]() PDF
| Video | Code
PDF
| Video | Code